Una de las características principales de las placas Raspberry Pi son sus pines GPIO (General Purpose Input Output) (Entrada y Salida de Propósito General). En estos pines podemos conectar todo tipo de componentes o dispositivos electrónicos. Unos de los componentes que podemos conectar son pulsadores e interruptores para interactuar con la placa.
Los pulsadores y los interruptores pueden estar abiertos o cerrados. Los pulsadores cambian de estado mientras se les presiona y vuelven a su estado inicial cuando se deja de presionar. Los interruptores mantienen su nuevo estado al dejar de presionar. Los pulsadores pueden ser NO (Normaly Open) (Normalmente Abierto) o NC (Normaly Closed) (Normalmente Cerrado). Algunos tienen tres contactos y se pueden usar de las dos formas.
En la placa hay dos filas de 20 pines. 2 de estos pines proporcionan 3,3 V y unos 500 mA de corriente continua. Otros dos pines proporcionan 5 V. Están conectados directamente a la entrada de alimentación de la placa y pueden proporcionar toda la energía del adaptador de corriente menos la usada por la propia placa. Entre los pines también hay 8 conexiones a tierra. Los 28 pines restantes son pines digitales de entrada/salida que podemos utilizar para conectar componentes y su voltaje debe estar entre 0 V y 3,3 V.
1| 3,3V 2| 5V 3| GPIO 2 4| 5V 5| GPIO 3 6| TIERRA 7| GPIO 4 8| GPIO 14 9| TIERRA 10| GPIO 15 11| GPIO 17 12| GPIO 18 13| GPIO 27 14| TIERRA 15| GPIO 22 16| GPIO 23 17| 3,3v 18| GPIO 24 19| GPIO 10 20| TIERRA 21| GPIO 9 22| GPIO 25 23| GPIO 11 24| GPIO 8 25| TIERRA 26| GPIO 7 27| GPIO 0 28| GPIO 1 29| GPIO 5 30| TIERRA 31| GPIO 6 32| GPIO 12 33| GPIO 13 34| TIERRA 35| GPIO 19 36| GPIO 16 37| GPIO 26 38| GPIO 20 39| TIERRA 40| GPIO 21
Para controlar los pines podemos utilizar los comandos del paquete gpiod. Con el comando gpiodetect se detectan los chips GPIO del sistema y con el comando gpioinfo vemos información de las líneas de los chips. En la placa Raspberry Pi 4B los pines GPIO de la placa están controlados por las primeras 28 líneas del chip gpiochip0, en otros modelos puede ser algo diferente.
# apt-get install gpiod # gpiodetect gpiochip0 [pinctrl-bcm2711] (58 lines) gpiochip1 [raspberrypi-exp-gpio] (8 lines) # gpioinfo gpiochip0 gpiochip0 - 58 lines: line 0: "ID_SDA" unused input active-high line 1: "ID_SCL" unused input active-high line 2: "GPIO2" unused input active-high line 3: "GPIO3" unused input active-high line 4: "GPIO4" unused input active-high line 5: "GPIO5" unused input active-high line 6: "GPIO6" unused input active-high line 7: "GPIO7" unused input active-high line 8: "GPIO8" unused input active-high line 9: "GPIO9" unused input active-high line 10: "GPIO10" unused input active-high line 11: "GPIO11" unused input active-high line 12: "GPIO12" unused input active-high line 13: "GPIO13" unused input active-high line 14: "GPIO14" unused input active-high line 15: "GPIO15" unused input active-high line 16: "GPIO16" unused input active-high line 17: "GPIO17" unused input active-high line 18: "GPIO18" unused input active-high line 19: "GPIO19" unused input active-high line 20: "GPIO20" unused input active-high line 21: "GPIO21" unused input active-high line 22: "GPIO22" unused input active-high line 23: "GPIO23" unused input active-high line 24: "GPIO24" unused input active-high line 25: "GPIO25" unused input active-high line 26: "GPIO26" unused input active-high line 27: "GPIO27" unused input active-high ...
La placa viene preparada para utilizar el pin GPIO 3 para iniciar y parar el sistema operativo. Cuando se para el sistema operativo la placa sigue encendida. Si mediante un pulsador NO conectamos los pines 5 y 6 (GPIO 3 y TIERRA), el sistema operativo volverá a iniciarse. Para conectar el pulsador a los pines podemos usar cables puente. En un extremo deben tener un conector hembra para el pin GPIO y en el otro hay que cortar el conector y pelar el cable para conectarlo al pulsador.

Si queremos que al volver a accionar el pulsador se pare el sistema operativo, podemos añadir al archivo de configuración /boot/firmware/config.txt el siguiente parámetro:
dtoverlay=gpio-shutdown
Si después de reiniciar ejecutamos el comando gpioinfo podremos ver como el pin GPIO 3 está en uso para parar el sistema.
# gpioinfo gpiochip0 gpiochip0 - 58 lines: line 3: "GPIO3" "shutdown" input active-low [used]
Para añadir más pulsadores para otras acciones podemos utilizar cualquiera de los pines GPIO y un pin de 3,3 V o TIERRA. Cuando el pulsador está abierto el pin GPIO está desconectado y tiene un voltaje indeterminado. Para poder detectar el cambio de estado del pulsador es necesario dar un voltaje al pin GPIO cuando está desconectado.
Si usamos un pin de TIERRA debemos conectar el pin GPIO a 3,3 V mediante una resistencia para subir su voltaje a 3,3 V. Si usamos un pin de 3,3 V debemos conectar el pin GPIO a tierra mediante una resistencia para bajar su voltaje a 0 V. El chip controlador de los pines incluye estas resistencias y no es necesario que las añadamos nosotros. Con estas configuraciones si el pulsador cambia de estado el voltaje del pin GPIO bajará de 3,3 V a 0 V o subirá de 0 V a 3,3 V. La resistencia para subir el voltaje recibe el nombre de "pull-up" y la resistencia para bajarlo "pull-down".
El comando gpiomon permite monitorizar los cambios de voltaje de un pin GPIO para detectar cuando se ha accionado el pulsador. Con el parámetro -f (falling) se le indica que solo detecte la bajada de voltaje de 3,3 V a 0 V. Con el parámetro -r (rising) se le indica que solo detecte la subida de voltaje de 0 V a 3,3 V. El parámetro -B permite fijar el voltaje de los pines GPIO desconectados con las opciones pull-up o pull-down.
PIN RESISTENCIA PULSADOR NO PULSADOR NC ----------- -------------- -------------------- -------------------- TIERRA (0V) PULL-UP (3,3V) FALLING (3,3V -> 0V) RISING (0V -> 3,3V) 3,3V PULL-DOWN (0V) RISING (0V -> 3,3V) FALLING (3,3V -> 0V)
Si conectamos el pin GPIO 27 a un pin TIERRA mediante un pulsador NO, debemos indicarle al comando gpiomon que suba el voltaje con el parámetro -B pull-up y detecte la bajada de voltaje con el parámetro -f. El parámetro -s hace que el comando no imprima nada por pantalla y el parámetro -n indica el número de eventos que debe detectar antes de terminar. Por último se le indica el chip y el pin o pines GPIO.
gpiomon -s -f -n 1 -B pull-up gpiochip0 27
Este comando lo podemos utilizar en un script. Cuando detecta el cambio de voltaje termina su ejecución y da paso al código siguiente. Si lo incluimos en un bucle infinito el script estará continuamente esperando la pulsación y ejecutando el código. Por ejemplo podemos tomar una imagen de una cámara con FFmpeg y enviarla por correo electrónico. También podemos enviarla con un sistema de notificaciones como Pushover.
#!/usr/bin/bash
GPIO=27
CAMERA=/dev/video0
DIRECTORY=/var/lib/notifications
TOKEN="xxxxxxxxxxxxxxxxxxxxxxxxxxxxxx"
USER="xxxxxxxxxxxxxxxxxxxxxxxxxxxxxx"
MESSAGE="Camera Image"
SERVER=https://api.pushover.net/1/messages.json
while true
do
gpiomon -s -f -n 1 -B pull-up gpiochip0 $GPIO
datetime=`date +%F_%H-%M-%S`
image=$DIRECTORY/$datetime.jpeg
ffmpeg -f v4l2 -i $CAMERA -loglevel quiet $image
curl -s -F token=$TOKEN -F user=$USER -F message="$MESSAGE" -F attachment=@$image $SERVER > /dev/null
done
Para ejecutar el script al iniciar el sistema operativo lo más conveniente es utilizar un servicio de Systemd. El script debemos copiarlo a un directorio de la variable $PATH y darle permisos de ejecución. El servicio tiene que ser ejecutado por un usuario que tenga permiso para acceder a los chips GPIO y a la cámara. Para ello debe pertenecer a los grupos gpio y video. Las imágenes tomadas de la cámara se pueden guardar en un subdirectorio de /var/lib.
# cp notifications.sh /usr/local/bin # chmod +x /usr/local/bin/notifications.sh # useradd notifications # usermod -a -G gpio,video notifications # mkdir /var/lib/notifications # chown notifications:notifications /var/lib/notifications # vi /lib/systemd/system/notifications.service [Unit] Description=Notifications [Service] Type=simple User=notifications ExecStart=/usr/local/bin/notifications.sh [Install] WantedBy=multi-user.target # systemctl enable notifications
Mientras se ejecuta el comando gpiomon podemos ver con el comando gpioinfo como el pin GPIO 27 está en uso y con resistencia "pull-up". Cuando termina la ejecución del comando gpiomon el pin GPIO 27 vuelve a su estado inicial.
# gpioinfo gpiochip0 gpiochip0 - 58 lines: line 27: "GPIO27" "gpiomon" input active-high [used pull-up]
Si utilizamos un interruptor además de detectar cuando se abre o cierra podemos ver su estado en cualquier momento con el comando gpioget. Si conectamos el interruptor a un pin TIERRA, cuando esté abierto el comando devolverá el valor "1" y cuando esté cerrado el valor "0". Si queremos que sea al revés debemos indicar con el parámetro -l (active-low) que su valor activo es 0 V.
#!/usr/bin/bash
GPIO=21
switch=`gpioget -l -B pull-up gpiochip0 $GPIO`
if [ $switch -eq 0 ]
then
echo "Switch Open"
else
echo "Switch Closed"
fi
También se puede utilizar un control remoto como pulsador o interruptor. Un método muy usado son los controles remotos que usan chips EV1527 y la frecuencia 433 Mhz. Se componen de un receptor y un mando. El mando envía un código fijo de 24 bits sin cifrar. 20 bits identifican al mando y 4 bits el botón pulsado. Esto permite 1048576 (220) mandos distintos y 16 (24) botones por mando.
Los receptores tienen uno o varios relés o salidas digitales que son accionados al presionar los botones del mando. Los receptores tienen una lista con los códigos de los mandos a los que se permite enviar ordenes al receptor. Como el código es fijo y no está cifrado el sistema es muy sencillo, rápido y consume poca energía. Por ejemplo la batería de los mandos dura bastante. Pero si necesitamos seguridad tendremos que usar otro sistema con código variable y cifrado.

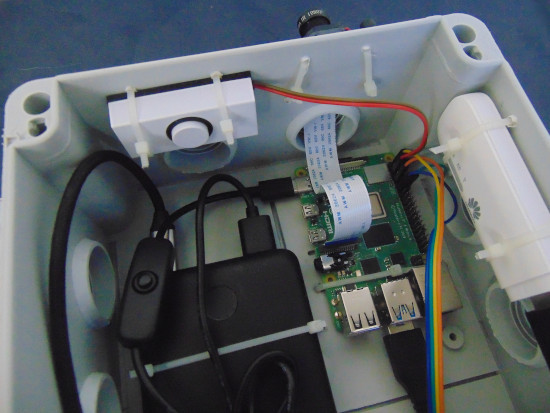
Yo he utilizado un control remoto con un solo relé. Debe ser alimentado por entre 5 V y 30 V, se puede utilizar un pin de 5 V de la placa. El relé tiene tres contactos: NO (Normaly Open) (Normalmente Abierto), COM (Común) y NC (Normaly Closed) (Normalmente Cerrado). En estado de reposo los contactos NO y COM están desconectados y los contactos NC y COM están conectados. Al accionar el relé se conectan los contactos NO y COM y se desconectan los contactos NC y COM. El receptor puede almacenar hasta 20 códigos de mando.
Para añadir un mando a la lista de mandos permitidos hay que presionar un botón del receptor y a continuación uno o dos botones del mando. Dependiendo del número de veces que se presione el botón del receptor se configura el mando para que funcione como pulsador, interruptor o interruptor temporal. Yo lo he configurado como pulsador, y conectando los contactos NO y COM a un pin TIERRA y un pin GPIO funciona igual que un pulsador NO.
PLACA CABLE CONTROL REMOTO ------- -------- ------------------- TIERRA NARANJA TIERRA 5V AMARILLO 5V TIERRA VERDE NORMALMENTE ABIERTO GPIO 27 AZUL COMÚN




Si queremos tener más control, como por ejemplo realizar diferentes acciones dependiendo del código del mando, podemos utilizar un receptor de 433 MHz conectado a los pines GPIO y RPI-RF. También es posible usar un receptor SDR (Software Defined Radio) (Radio Definida por Software) y RTL_433.
Excelente informacion estimado, me ha gustado mucho tu blog he aprendido mucho.
ResponderEliminarGracias, me alegra que sea útil el blog.
Eliminar